Overview
LiG SDK can get the information of “device number” and “reverse positioning” of LigTag through the camera on the device. The value of “Reverse Positioning” is explained here.
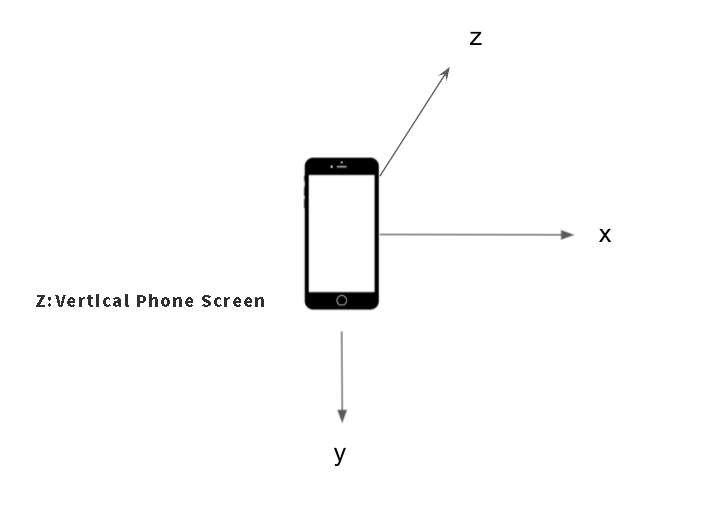
Camera Coordinate
This is a coordinate system with the lens on the device as the origin, where the z-axis is defined perpendicular to the lens outward, following the right-hand rule.
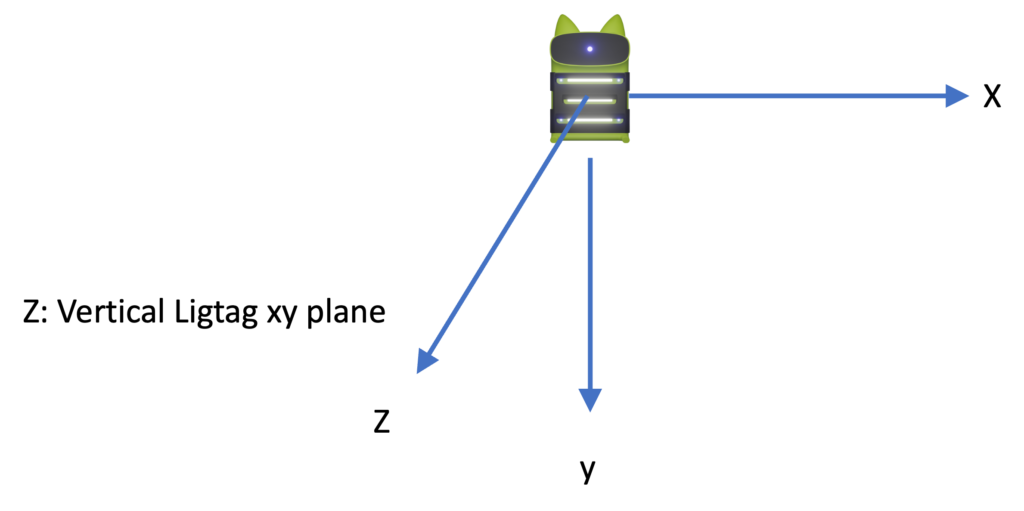
LigTag Coordinate
This is a coordinate system with the center of LigTag as the origin, and the z-axis is defined perpendicular to the three parallel light bar sections outward, following the left-hand rule.
Reverse Positioning
The SDK returns two vectors, R (rotationInfos) and T (translationInfos).
- Rotation Vector: The angle of rotation of x, y, z with the LigTag coordinate system as the origin.
- Translation Vector: Displacement of x, y, z with LigTag coordinate system as origin
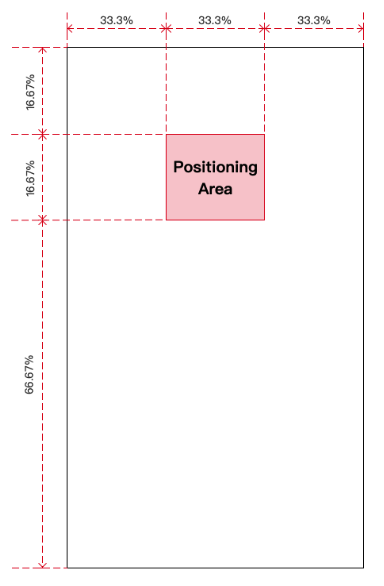
“Effective Area” on the Scanning page
The reverse positioning values will have different Confidence Indices depending on the region they are in. Currently, there is a Active Area in the upper center of the scanning page. If the cursor is moved to the Active Area, the confidence index will be the highest. The Positioning Area in the figure below is the “Active Area”.